Detecting player position during a badminton rally
Overview:
Object detection models are generally trained on datasets with a large number of common categories of objects. Most common datasets for object detection are COCO and VOC. Since these datasets contain a large number of everyday objects, we can use models trained this way to infer object categories for real-life scenarios.
In this tutorial we would use person category to track person/persons during a badminton rally and would plot their positions on a standard badminton court-plane. This can be thought of as a first step in a sports-analytics pipeline which may also include pose-detection functionality to categorize different shots and hence able to generate automatic reports of a sport-person game-play. Fast models for purposes like object-detection, pose-estimation opens up a whole lot of opportunities even at amateur level.
We would be using Object-detection module for person-detection which has been trained on COCO dataset. Model accuracy is not state-of-art but its fast speed allows us to use this on any consumer CPU in the field. User can choose to use a different object-detection model for the sake of tutorial.
import numpy as np
import cv2
import matplotlib.pyplot as plt
cap = cv2.VideoCapture("./tty_sindhu.mp4")
ret,frame = cap.read()
Transformation:
Since we would like to display a sports person's movements on a standard court given a video of person's gameplay, we would need to transform the coordinates from one frame( source) to another frame( destination).
We can assume that such a solution( matrix ) exists , that would transform the source coordinates to the destination coordinates. OR if not, we can use something like least-squares to iteratively reach a solution that is good enough for our case.
Source Coordinates:
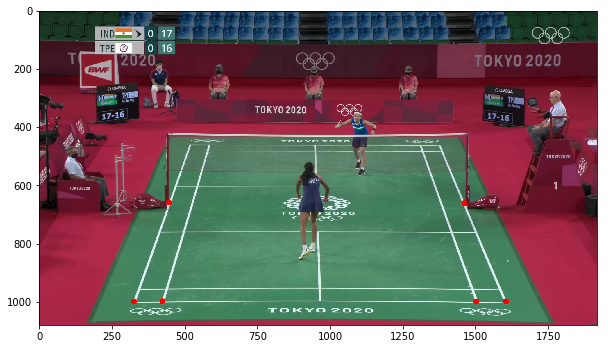
Source coordinates would refer to the corners of the court being shown for the current video.
We would be selecting 6 bottom-half markings of badminton-court as source-coordinates
#In format (x,y),top left is considered ORIGIN (0,0)
DOUBLE_BOTTOM_LEFT_SRC = [326,999]
DOUBLE_TOP_LEFT_SRC = [447,658]
DOUBLE_BOTTOM_RIGHT_SRC = [1606,998]
DOUBLE_TOP_RIGHT_SRC = [1464,660]
SINGLE_BOTTOM_LEFT_SRC = [424,998]
SINGLE_BOTTOM_RIGHT_SRC = [1504,998]
src_coords = np.hstack((DOUBLE_BOTTOM_LEFT_SRC,DOUBLE_TOP_LEFT_SRC,DOUBLE_BOTTOM_RIGHT_SRC,DOUBLE_TOP_RIGHT_SRC,SINGLE_BOTTOM_LEFT_SRC,
SINGLE_BOTTOM_RIGHT_SRC)).reshape(6,2)
src_coords_final = np.hstack((src_coords,np.ones((src_coords.shape[0],1)))).astype("float32")
for (x,y) in src_coords:
cv2.circle(frame,(int(x),int(y)),radius=10,color=(0,0,255),thickness=-1)
plt.figure(figsize=(10,10))
plt.imshow(frame[:,:,::-1])
plt.show()
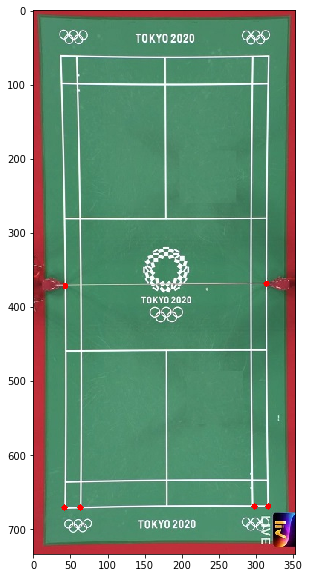
Destination coords: This would generally be referring to the coordinates on a STANDARD badminton court frame as show below.
court = cv2.imread("./court_0.jpg")
DOUBLE_BOTTOM_LEFT_DST = [42,671]
DOUBLE_TOP_LEFT_DST = [43,372]
DOUBLE_BOTTOM_RIGHT_DST = [316,669]
DOUBLE_TOP_RIGHT_DST = [314,369]
SINGLE_BOTTOM_LEFT_DST = [63,671]
SINGLE_BOTTOM_RIGHT_DST = [298,669]
dst_coords = np.hstack((DOUBLE_BOTTOM_LEFT_DST,DOUBLE_TOP_LEFT_DST,DOUBLE_BOTTOM_RIGHT_DST,DOUBLE_TOP_RIGHT_DST,SINGLE_BOTTOM_LEFT_DST,
SINGLE_BOTTOM_RIGHT_DST)).reshape(6,2).astype("float32")
for (x,y) in dst_coords:
cv2.circle(court,(int(x),int(y)),radius=4,color=(0,0,255),thickness=-1)
plt.figure(figsize=(10,10))
plt.imshow(court[:,:,::-1])
plt.show()
We would try to find transformation-matrix using least squares (i.e trying to minimize the square of distance b/w transformed and src coordinates). We would be using numpy.linalg.lstsq.
from numpy.linalg import lstsq
M_transform = lstsq(src_coords_final[:3,:],dst_coords[:3,:],rcond=-1)[0]
print(M_transform)
[[ 2.1411957e-01 -8.7771768e-04]
[ 7.3045358e-02 8.7652141e-01]
[-1.0077529e+02 -2.0435873e+02]]
np.matmul(src_coords_final,M_transform)
array([[ 41.999992, 671. ],
[ 43.000008, 372.00003 ],
[316. , 669. ],
[260.90567 , 372.86044 ],
[ 62.910667, 670.0375 ],
[294.1598 , 669.0896 ]], dtype=float32)
dst_coords
array([[ 42., 671.],
[ 43., 372.],
[316., 669.],
[314., 369.],
[ 63., 671.],
[298., 669.]], dtype=float32)
We got ourselves a matrix for the purposes of transformation. We can now see how would it look on the full video.
For display purposes we would be using mid-point of bottom side of detected person rectangle.
import object_detection_python_module as od #import the module
od.load_model("./objectdetection.bin") #initialize the model and load weights.
court = cv2.imread("./court_0.jpg")
cap = cv2.VideoCapture("./tty_sindhu.mp4")
frame,ret = cap.read()
COURT_H = court.shape[0]
COURT_W = court.shape[1]
while (ret == True):
predictions = od.detect_object(frame,conf_threshold=0.9,class_index=0) #class_index = 0 --> person category
num_persons_detected = predictions.shape[0]
#selecting only top/single person for display-purposes.
if num_persons_detected > 0:
left,top,right,bottom,confidence,class_id = predictions[0]
x = (left + right)/2
y = bottom
t_coordinates = np.matmul(np.array([[x,y,1]]).astype("float32"),M_transform)
x_t = t_coordinates[0,0]
y_t = t_coordinates[0,1]
x_t = min(max(0,x_t),COURT_W-1)
y_t = min(max(0,y_t),COURT_H-1)
cv2.rectangle(frame,(int(left),int(top)),(int(right),int(bottom)),(0,255,0),1)
cv2.circle(court,(int(x_t),int(y_t)),radius=6,color=(255,0,0),thickness=-1)
frame[0:COURT_H,0:COURT_W,0:3] = court #overlay court pixels on to the frame.
cv2.imshow("frame",frame)
if cv2.waitKey(1) == -1:
ret,frame = cap.read()
continue
else:
break
Final Result:
The resulting video shown below runs end to end at 26 fps ( including time taken to render video ) on my intel i7 quad-core cpu.
from IPython.display import HTML
HTML("""
<div align="middle">
<video width="80%" controls>
<source src="./tutorial_badminton_track_files/badminton_2.mp4" type="video/mp4">
</video></div>""")
Remarks:
In this case, we manually annotated the corners in the first-frame of badminton-rally video, to get a transformation(linear) matrix. Since badminton-courts have clear markings, we can try to detect corners/perimeter to get a set of source coordinates using off-the-shelf edge detectors Or using fancy( neural-network) based detectors. In case of amateur courts , some calibration protocol can be established to register corners.
For more deep literature about automatic full-analysis of badminton sport , check out https://cvit.iiit.ac.in/research/projects/cvit-projects/badminton-analytics.
Resources:
Original Video. https://www.youtube.com/watch?v=W4EGrNeFlys
API used:
 This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.